薄膜捕获口袋系统航天器动力学及FNTSM控制研究
发布时间:2024-02-29 10:20:07来源:
近年来,随着航天发射活动的大幅增加,离轨航天器数量急剧上升,对现役在轨航天器和未来航天活动都造成严重影响。传统的绳网捕获系统作为一种主动使航天器脱离轨道的技术,在减轻和清除空间碎片方面具有巨大的潜力。
然而,绳索系统面临着诸如难以长时间保持形状、容易自缠结、能量损失以及有效捕获面积减少等挑战。相比之下,薄膜可以沿着规则的形状折叠和展开,与系绳相比具有更大的灵活性和可靠性。它们成为解决纠缠问题的有效解决方案,并为减轻和清除空间碎片提供了一种有前景的方法。
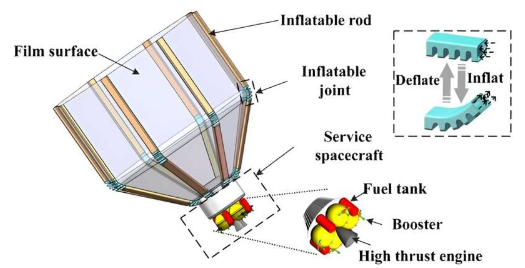
在最近发表在《Space: Science & Technology》上的一篇评论文章中,哈尔滨工业大学程伟教授团队与北京控制工程研究所和本哈大学的研究人员合作,设计了一种薄膜捕获口袋系统。
然而,该系统的柔性结构在运动过程中容易发生明显的变形和振动,对航天器运行造成相当大的干扰。为了定量分析这些干扰,本研究重点关注薄膜袋捕获系统的动态建模和姿态控制。
该研究涉及开发集成到姿态跟踪控制律中的快速非奇异终端滑模控制器(FNTSM)和固定时间膨胀观测器(FxESO)。通过建立虚拟样机验证了控制器的有效性。该研究为系统未来在轨应用提供理论支撑。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。